Координатные круги
Координатные круги служат для наводки телескопа на объект с известными координатами. Координаты объекта легче всего получить в любой программе - планетарии. При подключении телескопа к компьютеру механические координатные круги практически бесполезны, не будешь же носиться от компьютера к телескопу и назад. В такой ситуации на оси телескопа устанавливают энкодеры. Энкодеры с достаточым количеством отсчётов, порядка 4000 имп/об и более, имеют приличную цену, поэтому целесообразно изготовить энкодеры самому.
Контроллер энкодеров
Сначала имеет смысл рассказать о контроллере энкодеров. Для использования в своём телескопе, я применил контроллер Девида Екка. Контроллер позволяет управлять двумя энкодерами (высоты и азимута). К компьютеру он подключается по интерфейсу RS232.
Схема
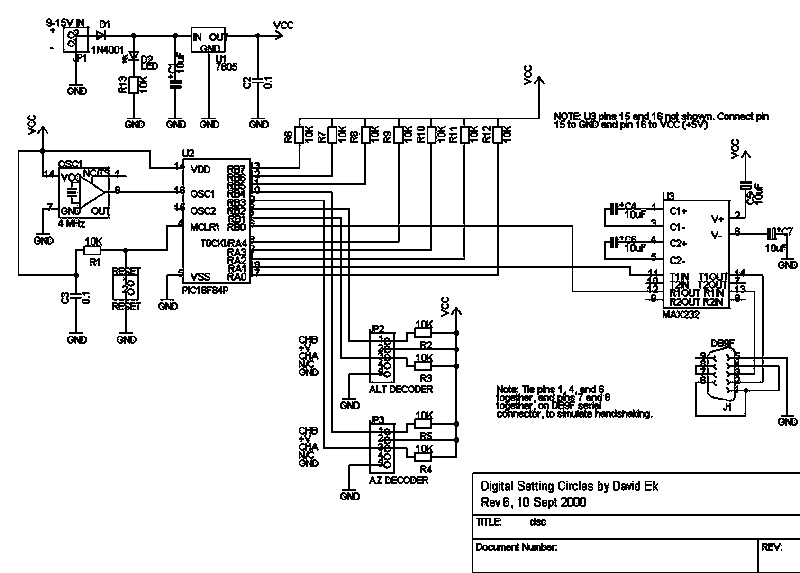
Схема контроллера собрана на PIC16F84. Он запоминает количество импульсов пришедших с энкодеров и, по запросу с компьютера, выдаёт текущие координаты телескопа.
Энкодеры изготовлены из датчиков положения механической компьютерной мыши. Мне попалась мышь, у которой фотоприёмник исполнен с общим катодом, поэтому пришлось установить буферные транзисторные каскады с открытым колектором.
Диаграмма импульсов
Колесо энкодера имеет 50 прорезей. Два датчика со смещенными на 90 градусов импульсами позволяют определять направление вращения и при использовании передних и задних фронтов позволяют получить с каждой прорези 4 импульса. Всего получается 200 имп/об.
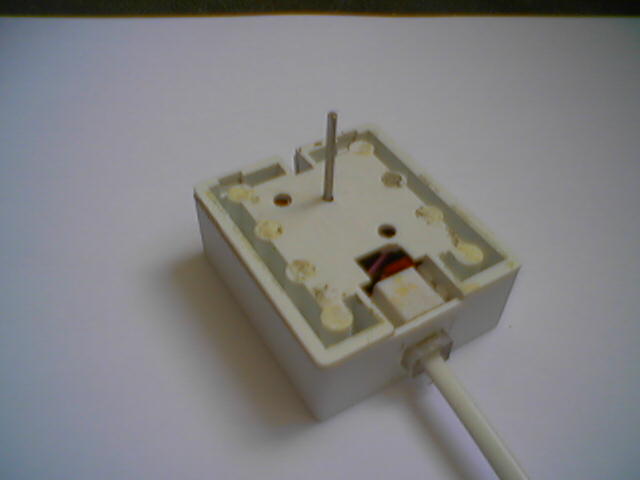
энкодер внутри

Энкодер выполнен в корпусе телефонной розетки. Колесо с прорезями закреплено на стальной оси диаметром (2мм.). Ось вращается в дюралевых подшипниках. Оптический узел, отпиленный от платы мыши, крепится на проволочном кронштейне к корпусу и регулируется изгибом кронштейна. Формирователи импульсов выполнены навесным монтажем.
Энкодер вид снизу
На оси энкодера закреплён шкив диаметром (4мм.). В движение энкодер
приводится одним витком приводного шнура монтировки. За счёт разных диаметров
полуосей высоты (300мм.) и поворотного основания (340мм.) и использовании (4мм.)
приводного шкива получаются следующие характеристики энкодеров. Ось высоты 15000
имп/об. Ось азимута 17000 имп/об.